Comment Telraam S2 mesure-t-il la vitesse ?
La Telraam S2 - tout comme notre capteur original, la Telraam V1 basée sur un Raspberry Pi - ne peut pas mesurer la vitesse directement comme un radar de police typique (qui est un petit radar Doppler), elle doit donc utiliser une méthode indirecte pour déduire les vitesses. Dans un monde idéal, si nous connaissions la distance entre la caméra et chaque objet passant, ou la longueur de la route couverte par le champ de vision de chaque unité Telraam S2, nous pourrions calculer les vitesses à partir des temps de parcours mesurés. Par exemple, la vitesse pourrait être facilement calculée à partir du temps que met une voiture à parcourir une distance connue sur la route.
Bien que cela semble bien en théorie, ce n'est pas réalisable en réalité pour des raisons qui ont déjà été discutées en utilisant l'exemple de la Telraam V1 dans la section " Mesure de la vitesse et données de vitesse irréalistes ".
Pour que nos mesures soient indépendantes de la distance, nous continuons à utiliser la solution que nous avons trouvée pour le Telraam V1 : La Telraam S2 mesure le temps que met une voiture pour parcourir sa propre longueur - qui ne dépend pas de la distance à partir de laquelle la voiture est perçue - et en supposant que la voiture a la longueur d'une voiture typique (une valeur que nous avons calculée à partir des voitures les plus populaires vendues ces dernières années en Belgique), elle peut calculer sa vitesse. Étant donné que Telraam S2 utilise une méthode légèrement différente (IA) pour trouver des objets que Telraam V1 (OpenCV) - et pour mesurer leur longueur - nous avons dû faire quelques tests pour nous assurer que les résultats étaient toujours précis.
Comment les mesures de vitesse de la Telraam S2 sont-elles calibrées et validées ?
La validation des vitesses est une tâche beaucoup plus difficile que la validation des comptages, car mesurer la vitesse d'une voiture pour un observateur extérieur est beaucoup plus difficile que de simplement l'inclure dans un comptage de véhicules. Comme nous n'avons pas accès aux radars Doppler, nous avons créé un environnement de test imitant les zones de mesure de la vitesse moyenne qui sont de plus en plus courantes sur les autoroutes. Le principe est le suivant : si nous pouvons mesurer le temps que mettent les voitures pour se rendre d'un point A à un point B connus, où nous connaissons la distance exacte entre ces deux points, alors à partir du temps écoulé et de la distance, nous pouvons calculer la vitesse exacte, qui sera considérée comme la vérité terrain. Si nous pouvons enregistrer les voitures entre les points A et B, puis transmettre cet enregistrement vidéo à la Telraam S2 dans notre environnement de test, nous pouvons également obtenir les vitesses mesurées par la Telraam. En comparant la vitesse réelle à la vitesse mesurée par la Telraam S2, nous pouvons 1) comparer la correspondance entre ces mesures et 2) calculer un facteur de correction interne pour les faire correspondre le plus possible.

Dans notre configuration de test (présentée ci-dessus), les points A et B étaient distants de 8 mètres, ce qui signifie que dans un enregistrement à 60 FPS, il fallait 43 images à une voiture se déplaçant à 40 km/h pour passer de l'un à l'autre (ce qui se traduit par une précision de mesure d'environ 1 km/h). Nous avons pris un enregistrement de 3 minutes de circulation fluide et mesuré la vitesse de chaque objet en notant l'heure à laquelle il a franchi la première et la dernière ligne espacées d'un mètre chacune. Les lignes ont pu être tracées et les mesures effectuées avec une grande précision grâce à la longueur de la bordure de trottoir mesurée le long du bord de la route, soit exactement un mètre, ainsi qu'à la résolution 4K et à la fréquence d'images de 60 FPS de la vidéo.
Au total, la vitesse de 56 voitures a été mesurée de cette manière, avant de passer la vidéo dans l'outil de débogage. Afin de couvrir une plus large gamme de vitesses et de tester les performances de Telraam S2 à des vitesses plus élevées, nous avons également créé une version accélérée de la vidéo (à deux fois la vitesse d'origine), et l'avons fait passer dans l'outil de débogage (en supposant deux fois les vitesses au sol d'origine pour chaque objet). Ce processus nous a fourni un facteur de correction qui a dû être introduit dans le firmware de la puce AI (avec la version FW 327940), après quoi nous avons obtenu le chiffre de validation de la vitesse suivant :
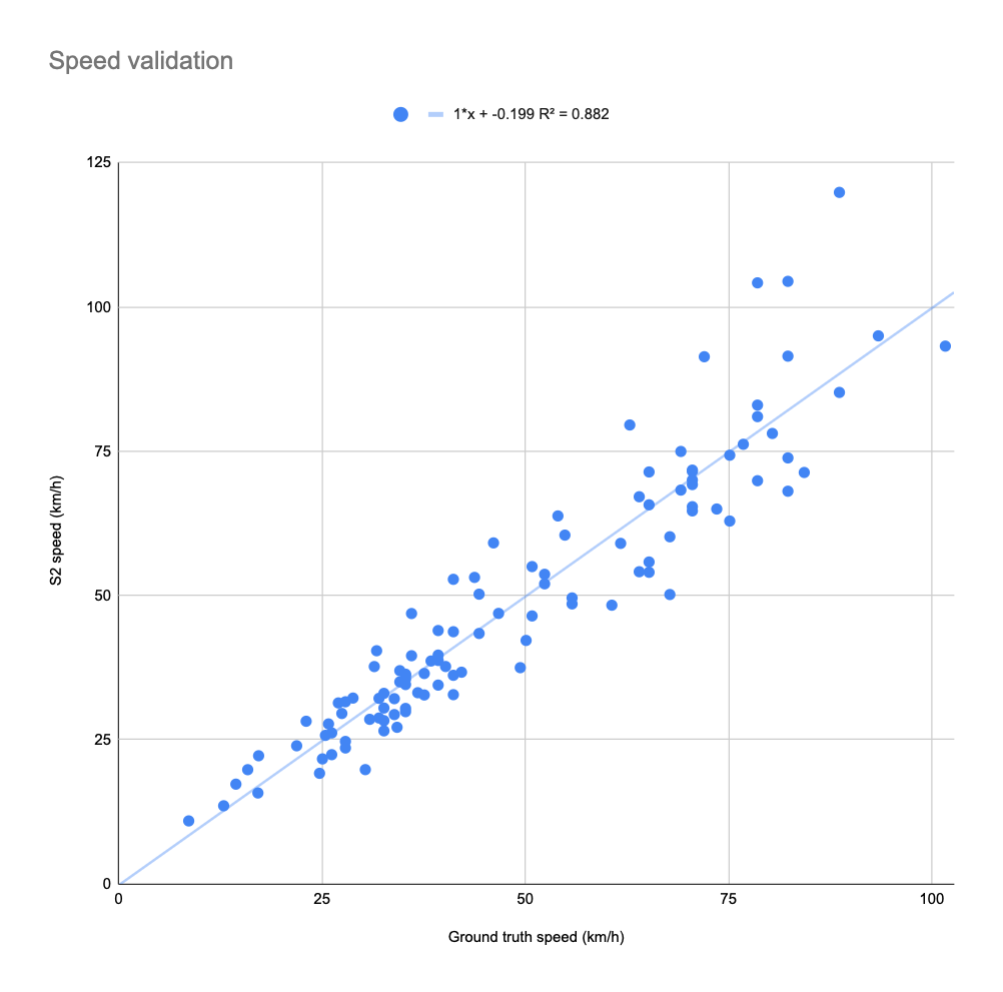
Il est évident que les vitesses mesurées par la Telraam S2 sont globalement en accord avec les mesures de la vérité terrain, avec une certaine dispersion inévitable, qui provient principalement du fait que toutes les voitures n'ont pas la même longueur, et que la longueur des voitures plus ou moins proches de la Telraam S2 peut être mesurée légèrement différemment par l'IA.
La V85 (vitesse du 85e percentile) dans l'échantillon complet de vérité terrain est de 74,6 km/h alors que dans les données de la Telraam S2 elle est de 71,6 km/h (précision de 96 %). Si l'on considère uniquement l'échantillon original (non dilué), la V85 de la vérité terrain est de 40,9 km/h alors que celle mesurée par la Telraam S2 est de 39,6 km/h, soit une précision de 97 %. C'est la précision que nous attendons dans des conditions urbaines.
Raisons pour lesquelles les données de vitesse de votre Telraam S2 pourraient être inexactes
Plusieurs facteurs influencent la précision des données de vitesse.
Le plus important d'entre eux est la déviation locale de la composition du parc automobile par rapport à notre échantillon d'étalonnage. Comme notre calcul de la vitesse suppose que chaque voiture a la longueur d'une voiture belge typique (ou plus précisément la longueur moyenne des 56 voitures de notre échantillon d'étalonnage), si la longueur du parc local est très différente, les vitesses deviendront de plus en plus inexactes à mesure que l'écart s'accroît. Les vitesses seront sous-estimées là où les voitures sont plus grandes (plus longues), et sous-estimées là où les voitures sont plus petites (plus courtes).
Le deuxième facteur à mentionner est le fait que le trafic soit inhabituellement éloigné (ou, dans des cas moins probables, proche) du dispositif Telraam S2. Nous n'avons pas effectué de tests pour étudier ces cas, mais d'après notre compréhension du fonctionnement de l'IA, nous pouvons supposer que si les voitures apparaissent très petites ou très grandes dans le champ de vision de la Telraam S2, la longueur perçue de ces objets par l'IA peut différer dans une certaine mesure de ce qui est considéré comme typique, ce qui aurait un effet similaire sur les mesures de vitesse que les écarts de taille de véhicules réels par rapport à la norme. Ces risques peuvent être minimisés en sélectionnant correctement la région d'intérêt (ROI) et en ne faisant pas confiance aux mesures de vitesse provenant des appareils Telraam S2 placés le long de routes extrêmement larges où les voies de circulation les plus proches et les plus éloignées sont très éloignées les unes des autres (par exemple, les routes à 3 voies dans chaque direction).
Enfin, étant donné que nous devons calculer la V85 à partir de données sur la vitesse qui ont été regroupées en tranches de 5 km/h, les valeurs de V85 données par Telraam peuvent présenter un écart allant jusqu'à 2,5 km/h par rapport à la V85 réelle, l'écart réel dépendant du volume de trafic, de la valeur absolue de la V85 et de l'uniformité des vitesses individuelles.
Le système Telraam S2 devrait présenter beaucoup moins d'erreurs de classification d'objets ou d'objets parasites que le système Telraam V1, ce qui ne devrait plus être une source d'erreur importante.